Wally: Wall Sliding System
Motorized wall panel that automatically opens and closes along a guide rail. App control, collision detection, and obstacle detection.
system

What is Wally
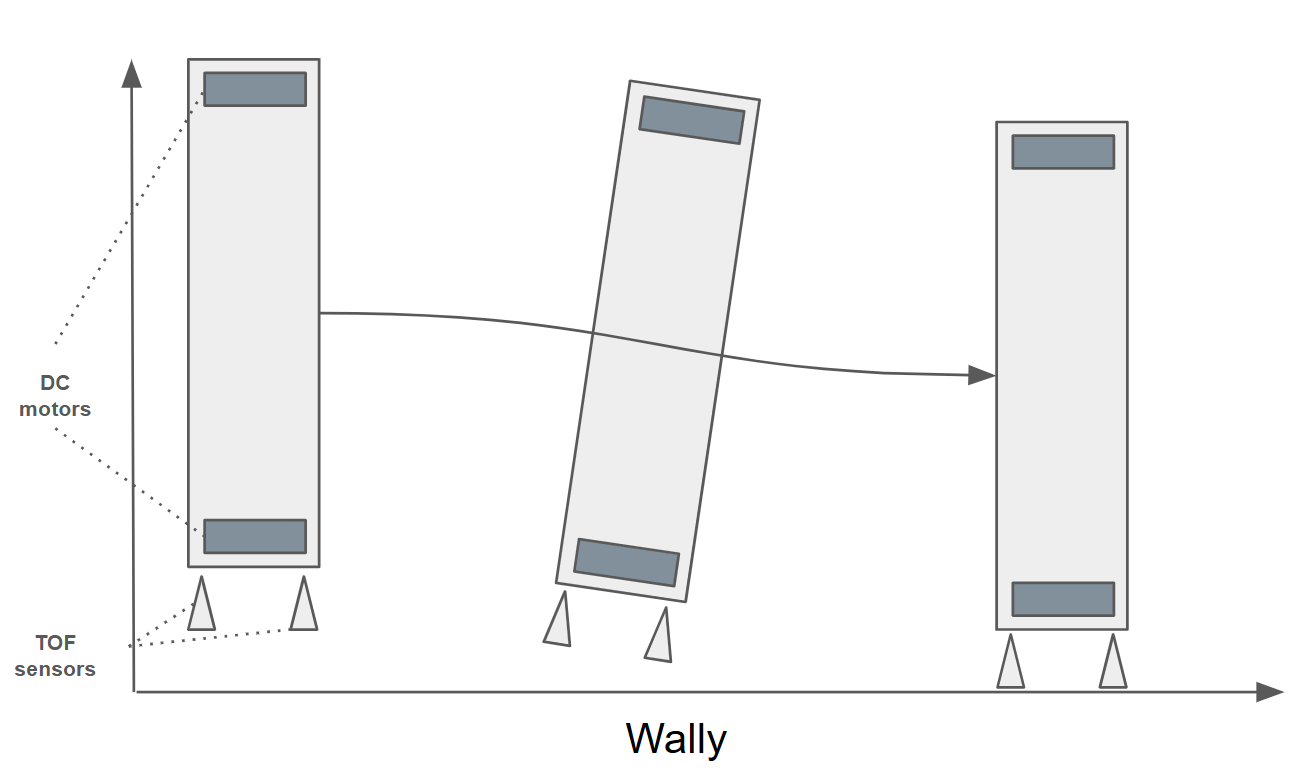
Wally is a motorized wall panel that automatically slides open and closed along a guide rail. It reveals hidden storage or dressing rooms behind the wall at the press of a button. Two motors move the panel horizontally while automatically maintaining parallel alignment with the rail.
How It Works
- Open — Press the app or button and the wall panel slides to the side, revealing the space behind it.
- Close — Press again and the panel returns to its original position, closing the wall.
- Obstacle detection — LiDAR scans 360 degrees around the panel. If a person or object is in the path, it stops immediately.
- Collision detection — If the panel contacts an object, it stops immediately.
Key Features
- App control — Open/close via smartphone over BLE
- Collision detection — Real-time motor torque monitoring with emergency stop on contact
- Obstacle detection — 360-degree LiDAR scanning detects obstacles in the travel path
- Parallel alignment — Automatic left/right motor speed adjustment keeps the panel parallel to the rail
- Remote monitoring — Status and alerts via WiFi
- OTA updates — Remote wireless firmware updates
Specifications
| Spec | Value |
|---|---|
| Parallel alignment error | ±2 mm |
| Contact sensitivity | 1 Nm |
Technical Highlights
- V1 → V2 architecture transition — Evolved from prototype (ESP32 single MCU) to production (RPi5 + STM32 distributed). STM32 handles real-time motor and sensor control while RPi5 manages LiDAR processing and logging.
- Differential drive parallel correction — Real-time angle correction via left/right motor speed difference. Parallel alignment error within ±2mm.
- 6-model regression collision detection — Six regression models (open/close × accel/constant/decel) predict expected torque to detect collisions.
- LiDAR-based obstacle detection — RPLIDAR C1 provides 360-degree scanning for both static and moving obstacles. This was impossible with ToF-only V1.
My Role
Sole developer of the entire Wally firmware. Designed and implemented both V1 (ESP32) and V2 (RPi5 + STM32) versions. Developed differential drive kinematics, LiDAR guide rail tracking, collision detection algorithm, BLE/WiFi communication, ROS2 integration, and rosbag logging system.