Automatic Plug-in Charger (APC)
Dual-controller vision system for automated plug insertion, achieving >95% success rate via template matching and variance-based contact detection
Context
- Goal: Automated plug insertion system for robotic charging
- Full-stack ownership: Designed and built entire project including mechanical hardware, electronics, and software
- CAD: SOLIDWORKS assembly with custom parts (base_housing, camera_bracket, gear_carrier, ring_gear)
- Codebase: ~1,822 lines Python (vision/FSM) + ~257 lines C++ (motor control)
Core Problem
- Plug insertion requires sub-millimeter alignment precision
- Real-time motor control cannot run reliably on Linux (non-deterministic)
- No force sensor available for contact detection
- GPU unavailable on Raspberry Pi for neural network inference
Why this is hard: Sub-millimeter precision requires real-time determinism that Linux cannot guarantee, while contact detection typically needs force sensors unavailable in this design.
Key Insight
Mechanical contact can be detected without force sensors by monitoring position variance—when the actuator pushes against a fixed object, motor oscillation increases position instability.
Implementation:
- RPi4: Vision processing and high-level state machine (Python)
- Arduino Mega 2560: Deterministic real-time motor control (C++)
- Variance threshold: 1.5 (3x normal steady-state variance of <0.5)
Approach
Phase 1: Hardware Design
4-axis motion system:
- X, Z axes: Linear steppers with 8mm pitch lead screws (~5μm/step resolution)
- Y axis: Linear stepper with 2mm pitch lead screw (~1.25μm/step resolution)
- Pi axis: Rotational servo (STS-3215) for angular alignment
Design decision: Y-axis uses finer pitch (2mm vs 8mm) for higher vertical precision at the cost of slower movement.
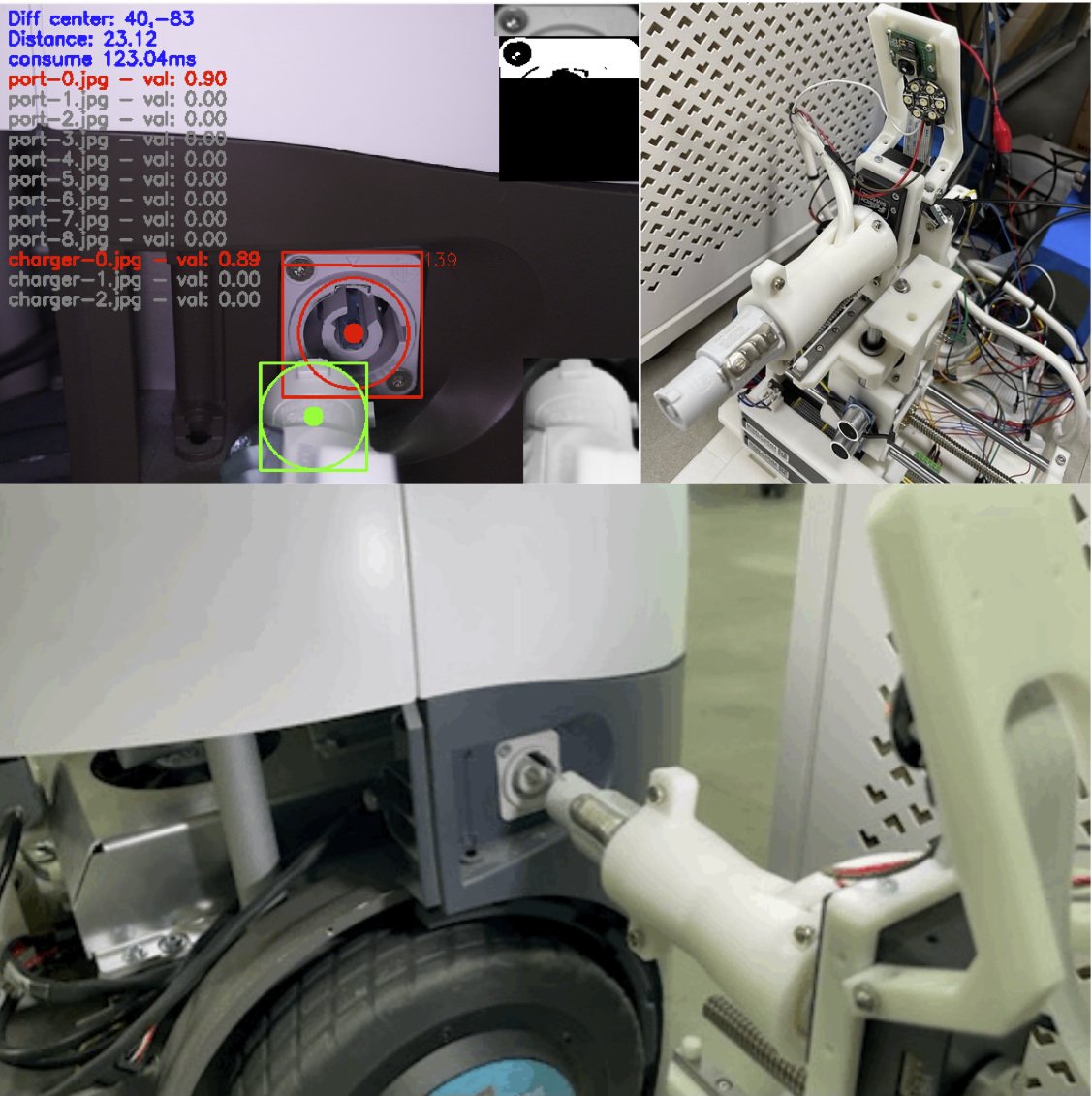
Phase 2: Vision Pipeline
Template matching (OpenCV cv2.TM_CCOEFF_NORMED):
- 9 port templates + 3 charger templates
- Threshold: 0.70-0.80
- Detection time: <50ms per frame
- Distance calculation:
1.36 * (156 - port_width)pixels to mm
Design decision: Template matching over YOLOv8 as primary method. YOLOv8 models available as backup (ONNX 12MB, TFLite 3.2MB) but template matching runs faster on RPi without GPU acceleration.
Phase 3: Control System
10-state FSM for charging sequence: WAIT → XY_PREPARE → Z_APPROX → MOVE_TO_CONTACT → XY_PRECISE → INSERT → CHARGE → CHARGING → DISCHARGE → DISCHARGE_MOVE_BACK
Failure recovery: Contact detection timeout triggers retract and retry alignment. Max 3 retries before abort.
Binary serial protocol:
- 56-byte data packets (Arduino → RPi)
- 6-byte command packets (RPi → Arduino)
- 115200 baud, 10 Hz update rate (100ms)
Contact detection via variance analysis:
- 100-sample position buffer (10 seconds at 10 Hz)
- Normal steady-state variance: <0.5
- Variance threshold: 1.5 (3x normal, set to avoid false positives)
- When Z-axis variance exceeds threshold, motor oscillation against obstruction indicates contact
Tradeoffs
| Decision | Rationale | Tradeoff |
|---|---|---|
| RPi + Arduino split | Real-time motor control vs vision processing separation | Serial communication complexity |
| Template matching primary | Fast processing on RPi without GPU | Requires manual template creation |
| Y-axis 2mm pitch | Higher precision for vertical alignment | Slower Y movement |
| Variance-based contact detection | No force sensor needed | Requires threshold tuning |
| Binary serial protocol | Efficient parsing, deterministic size | Less flexible than text |
Results
Validation (100+ consecutive test cycles):
- Success rate: >95% (failures recovered on retry)
- Average docking time: 15 seconds (vs ~30 seconds manual insertion)
- Position accuracy: ±0.5mm (port tolerance ±2mm, 4x margin)
Testing infrastructure:
- Unit tests: test_agent.py, test_detector.py (FSM and vision validation)
- Regression logs: success.log, fail.log for failure pattern analysis
Key Takeaway
- Controller separation enables reliable real-time motor control while maintaining flexible vision processing
- Variance-based contact detection eliminates need for force sensors through statistical analysis
- Template matching provides sufficient accuracy for precision alignment without GPU requirements
- Full mechanical + electrical + software integration demonstrates end-to-end system ownership