Wally: 벽면 슬라이딩 시스템
벽면 패널이 자동으로 열리고 닫히는 슬라이딩 시스템. 앱 제어, 충돌 감지, 장애물 감지 지원.
system

제품 소개
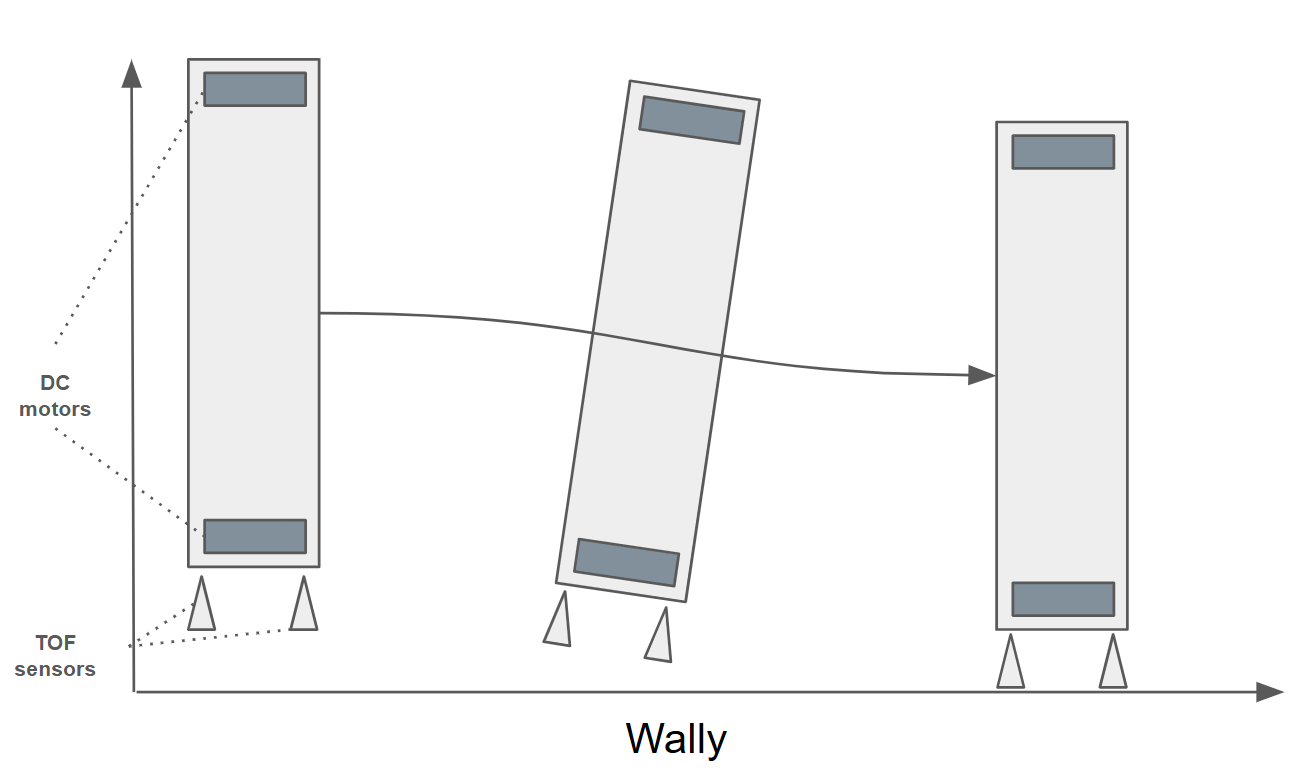
Wally는 벽면 패널이 가이드 레일을 따라 자동으로 열리고 닫히는 슬라이딩 시스템입니다. 벽 뒤에 숨겨진 수납공간이나 드레스룸을 버튼 하나로 열 수 있습니다. 두 개의 모터가 패널을 수평으로 이동시키며, 이동 중 자동으로 평행을 유지합니다.
작동 방식
- 열기 — 앱이나 버튼을 누르면 벽면 패널이 옆으로 슬라이딩하여 뒤쪽 공간이 열립니다.
- 닫기 — 다시 누르면 패널이 원래 위치로 돌아와 벽면을 닫습니다.
- 장애물 감지 — LiDAR가 360도로 주변을 스캔하여 이동 경로에 사람이나 물체가 있으면 즉시 정지합니다.
- 충돌 감지 — 패널이 물체와 접촉하면 즉시 정지합니다.
주요 기능
- 앱 제어 — BLE를 통해 스마트폰에서 열기/닫기를 조작할 수 있습니다
- 충돌 감지 — 모터 토크를 실시간으로 모니터링하여 접촉 시 긴급 정지합니다
- 장애물 감지 — LiDAR 360도 스캔으로 이동 경로의 장애물을 탐지합니다
- 평행 유지 — 좌우 모터 속도를 자동 조절하여 패널이 항상 레일과 평행하게 이동합니다
- 원격 모니터링 — WiFi를 통해 상태와 이상 알림을 확인할 수 있습니다
- OTA 업데이트 — 무선으로 펌웨어를 원격 업데이트합니다
사양
| 항목 | 값 |
|---|---|
| 평행 정렬 오차 | ±2 mm |
| 접촉 민감도 | 1 Nm |
기술 하이라이트
- V1 → V2 아키텍처 전환 — 프로토타입(ESP32 단일 MCU)에서 양산용(RPi5 + STM32 분산 구조)으로 전환했습니다. STM32가 모터와 센서를 실시간으로 제어하고, RPi5가 LiDAR 처리와 로깅을 담당합니다.
- 차동 구동 평행 보정 — 좌우 모터 속도 차이로 이동 중 각도 편차를 실시간 보정합니다. 평행 정렬 오차 ±2mm 이내입니다.
- 6-모델 회귀 충돌 감지 — 열기/닫기 × 가속 구간별 6개 회귀 모델로 예상 토크를 예측하여 충돌을 감지합니다.
- LiDAR 기반 장애물 감지 — RPLIDAR C1으로 360도 스캔하여 정지/이동 장애물을 모두 감지합니다. ToF만 사용하던 V1에서는 불가능했던 기능입니다.
담당 역할
Wally 펌웨어 전체를 단독으로 개발했습니다. V1(ESP32)과 V2(RPi5 + STM32) 두 버전 모두 설계 및 구현을 담당했습니다. 차동 구동 키네마틱스, LiDAR 가이드 레일 추적, 충돌 감지 알고리즘, BLE/WiFi 통신, ROS2 통합, rosbag 로깅 시스템을 개발했습니다.